로봇이 전선, 의류, 고무줄처럼 형태가 변형되는 물체를 다루는 기술은 제조·서비스 산업 자동화의 핵심 과제다. 하지만 그간에는 물체의 모양이 일정하지 않고 움직임을 예측하기 어려운 경우 로봇이 이를 정확하게 인식·조작하기 쉽지 않았다.
이러한 한계를 극복해 불완전한 시각 정보만으로도 변형 물체의 상태를 정밀하게 파악하고 능숙하게 다룰 수 있는 로봇 기술이 국내에서 개발됐다.
이 기술은 향후 케이블·전선 조립, 부드러운 부품을 다루는 제조업, 의류 정리와 포장 등 다양한 산업·서비스 분야의 지능형 자동화에 기여할 것으로 기대된다.
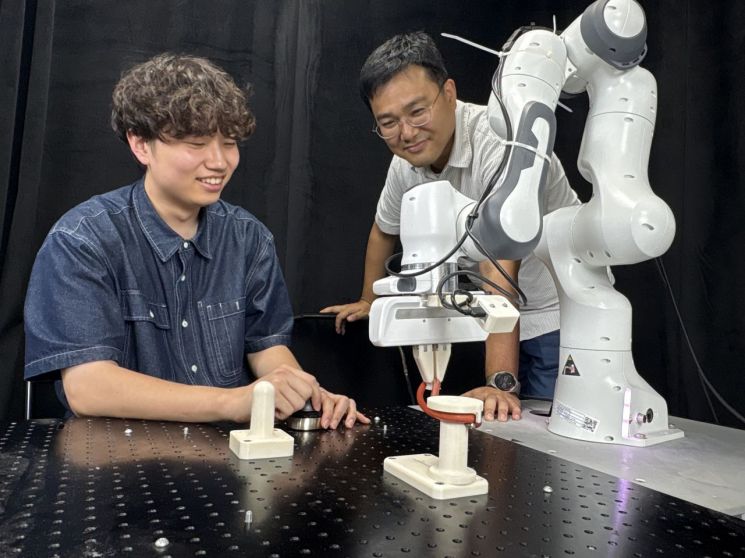
KAIST는 전산학부 박대형 교수 연구팀이 탄성 밴드처럼 형태가 연속적으로 변하고, 시각적으로 형태를 구별하기 어려운 물체를 로봇이 능숙하게 다룰 수 있게 하는 인공지능(AI) 기술 'INR-DOM(Implicit Neural-Representation for Deformable Object Manipulation)'을 개발했다고 21일 밝혔다.
INR-DOM은 로봇이 관찰한 부분적 3차원 정보만으로도 변형 가능한 물체의 전체 형상을 완전하게 복원하고, 이를 바탕으로 조작 방식을 학습할 수 있게 한다.
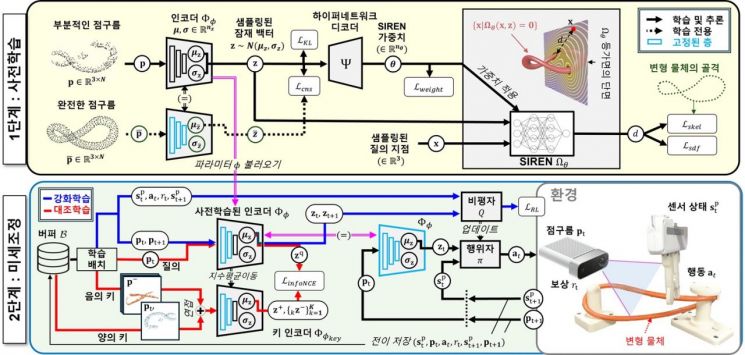
연구팀은 INR-DOM이 특정 과제를 효율적으로 학습할 수 있도록 '강화학습'과 '대조학습'을 결합한 새로운 2단계 학습 구조도 도입했다.
먼저 1단계 사전학습에서는 불완전한 점 구름(물체의 3차원 형상을 '표면을 찍은 점들의 집합'으로 표현하는 방식)으로부터 완전한 형상을 복원하는 모델을 학습시켜 가려짐에 강하고 늘어나는 물체의 표면을 잘 나타내는 상태 표현 모듈을 확보한다.
이후 2단계 미세조정에서 강화학습과 대조학습을 함께 적용해 로봇이 현재 상태와 목표 상태 간의 미묘한 차이를 명확히 구분, 과제 수행에 필요한 최적의 행동을 효율적으로 찾아내도록 한 것이 2단계 학습 구조의 큰 틀이다.
INR-DOM 기술을 적용한 시뮬레이션 환경에서 로봇은 고무링을 홈에 끼우기(sealing)와 O링을 부품에 설치하기(installation), 꼬인 고무줄을 풀기(disentanglement) 등 세 가지 과제에서 모두 기존보다 높은 성공률을 보였다.
특히 가장 어려운 과제였던 풀기 작업에서는 성공률이 75%에 달해 기존 최고 기술(ACID·26%)보다 49%가량 높은 성공률을 나타냈다.
연구팀은 INR-DOM 기술이 실제 환경에서도 적용 가능한지 여부를 검증하는 과정도 거쳤다. 이 결과 실제 환경에서도 로봇은 끼우기, 설치, 풀기 작업에서 90% 이상의 성공률을 달성했다.
무엇보다 시각적으로 구별이 어려운 양방향 꼬임 풀기 작업에서 기존 이미지 기반의 강화학습 기법보다 25% 향상된 성공률을 기록, 시각적 모호성을 극복한 효율적 조작이 가능하다는 것을 입증했다.
송민석 연구원은 "이번 연구는 로봇이 불완전한 정보만으로도 변형 물체의 전체 모습을 이해한 후 이를 바탕으로 복잡한 조작과정을 수행할 수 있는 가능성을 보여줬다"며 "연구팀은 이번 연구 성과가 향후 제조, 물류, 의료 등 산업·서비스 분야에서 인간과 협력하거나 인간을 대신해 작업을 수행하는 로봇 기술이 될 것으로 기대한다"고 말했다.
지금 뜨는 뉴스
한편 이번 연구는 KAIST 전산학부 송민석 석사과정이 제1 저자로 참여해 수행했다. 연구 성과는 지난 6월 21~25일 LA USC에서 열린 로봇 공학 분야 국제 학술대회 '로보틱스:사이언스 앤 시스템즈 (Robotics: Science and Systems, RSS) 2025'에서 발표됐다.
대전=정일웅 기자 jiw3061@asiae.co.kr
<ⓒ투자가를 위한 경제콘텐츠 플랫폼, 아시아경제(www.asiae.co.kr) 무단전재 배포금지>





![전문가 4인이 말하는 '의료 생태계의 대전환'[비대면진료의 미래⑥]](https://cwcontent.asiae.co.kr/asiaresize/319/2026013014211022823_1769750471.png)















{kind=link}
{kind=link}