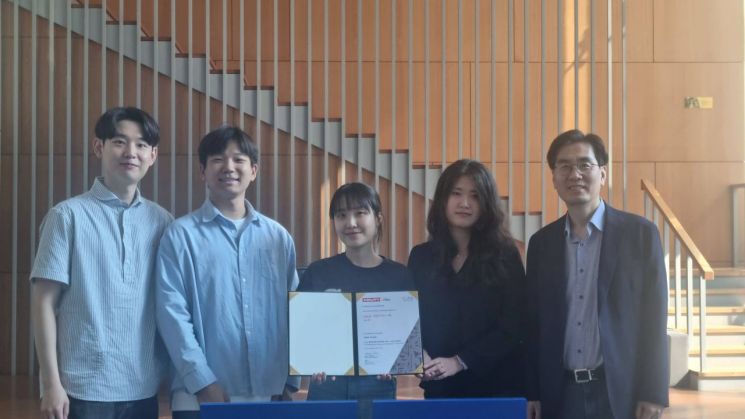
KAIST는 전기 및 전자공학부 명현 교수 연구실 '어반 로보틱스 랩(Team Urban Robotics Lab)' 팀이 지난 19~23일 미국 애틀랜타에서 열린 로봇 학술대회 '2025 IEEE 국제 로봇 및 자동화 학술대회' NSS 챌린지(Nothing Stands Still Challenge)에서 종합 1위를 차지했다고 30일 밝혔다.
NSS 챌린지는 리히텐슈타인 국적의 글로벌 건설회사인 '힐티(HILTI)'사와 미국 스탠퍼드대 그래디언트 스페이스 그룹이 2021년부터 공동 개최하던 힐티 SLAM(Simultaneous Localization and Mapping) 챌린지의 확장 버전으로 국제 로봇 및 자동화 학술대회 중 가장 저명한 챌린지로 꼽힌다.
이 챌린지는 건설 및 산업 환경 등 구조적 변화가 빈번한 상황에서 다양한 시간대에 수집된 라이다 스캔 데이터를 얼마나 정확하게 정합할 수 있는지를 중심으로 평가한다.
어반 로보틱스랩 팀은 다중 시간대와 공간에서 수집된 라이다 데이터 간의 정합 문제를 해결하는 독자적 위치 추정 및 지도 작성 기술로 중국 서북 이공대(2위)와 대만국립대(3위)를 제치고 전체 1위를 차지했다. 수상 팀에게는 상금 4000달러가 수여될 예정이다.
지금 뜨는 뉴스
한편 어반 로보틱스랩 팀은 2022년 SLAM 챌린지에 출전해 학계 2위를 수상한 데 이어 2023년에는 라이다 부문 전체 1위와 비전 부문 학계 1위를 수상했다.
대전=정일웅 기자 jiw3061@asiae.co.kr
<ⓒ투자가를 위한 경제콘텐츠 플랫폼, 아시아경제(www.asiae.co.kr) 무단전재 배포금지>




![전문가 4인이 말하는 '의료 생태계의 대전환'[비대면진료의 미래⑥]](https://cwcontent.asiae.co.kr/asiaresize/319/2026013014211022823_1769750471.png)








![휴게소 가서 화장실만?…차 세우게 만드는 이유가 있네[디깅 트래블]](https://cwcontent.asiae.co.kr/asiaresize/308/2026021612252143419_1771212320.jpg)
!['너무 피곤한데…' 새벽이면 떠지는 눈, '이것' 부터 점검해야[콕!건강]](https://cwcontent.asiae.co.kr/asiaresize/308/2026021308493041601_1770940169.jpg)
![라부부 VS 헬로키티, 주가는 누가 더 좋을까[주末머니]](https://cwcontent.asiae.co.kr/asiaresize/308/2026021611553943399_1771210539.jpg)



{kind=link}