상황인지, 정보판단, 장치에 명령 3단계로 작동
레이저로 목표물 위치 감지하는 '라이다'기술
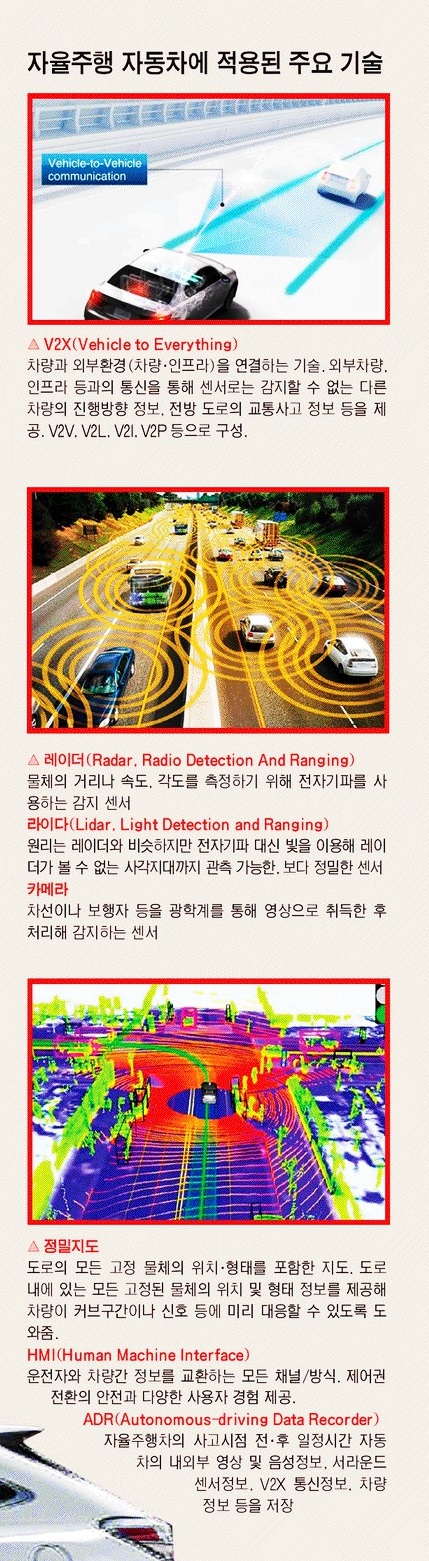
외부 차량과 센서로 정보 주고받는 V2V 등

[아시아경제 강희종 기자]지난 22일 서울 삼성동 코엑스 주변에서는 보기 드문 풍경이 펼쳐졌다. 차량이 통제된 가운데 국내에서 처음으로 자율주행차가 실제 도로를 달린 것이다.
현대자동차가 개발한 이 자동차는 최양희 미래창조과학부 장관을 태운 채 영동대교 북단에서 코엑스까지 약 3㎞을 달렸다. 제네시스를 기반으로 한 이 무인자동차는 운전자 없이도 속도 제한 교통 표지판과 차선, 신호 등을 인식하고 차선을 자동으로 변경하는 임무를 차질없이 수행했다.
며칠 뒤 개막한 2015창조경제박람회에서는 한국전자통신연구원(ETRI)이 코엑스 전시장 실내에서 일반인을 대상으로 한 자율주행차 시승 행사를 열었다. 이 차는 스마트워치로 호출하면 자동으로 이동하고 사람을 태운 뒤 정해진 길을 주행하고 T자형 주차까지 완벽하게 해냈다. 시승에 참여한 이들은 한결같이 "신기하다"는 반응을 보였다.
무인차는 어떤 원리로 움직이는 것일까. 또 어떤 최첨단 기술이 적용, 사람 없이 스스로 움직일 수 있는 것일까.
무인차의 작동원리는 크게 3가지 단계로 구분할 수 있다. 우선 주변 상황을 인식(인지)한 후 정보를 종합 판단한 뒤 이를 기계 장치에 명령을 내린다. 아주 간단해 보이지만 각 단계마다 고도의 기술이 필요하다.
사람은 운전할 때 눈을 통해 주변 상황을 인식하지만 눈이 없는 자동차는 각종 센서를 이용한다.
대표적인 것인 라이다(Lidar)다. 라이다는 레이저를 목표에 쏜 뒤 반사체나 산란체를 이용해 목표물의 위치나 거리 등을 계산한다. 라이다는 정확도가 높으나 가격이 매우 비싸다는 것이 단점이다.
실제 구글이 무인차에 적용한 벨로다인(Velodyne)사의 라이더는 7만500달러(한화 8700만원)로 웬만한 자동차 한대 값을 훌쩍 넘는다.
또 자동차 지붕 위에 탑재하기 때문에 양산차의 디자인으로는 적절하지 않다는 문제점도 있다.
이러한 문제점을 해결하기 위해 라이더 대신 레이더(Radar)나 카메라가 이용된다. 레이더는 전파를 발사해 주변 사물과의 거래나 속도를 탐지한다. 카메라는 신호등이나 표지판, 중앙선 등 주변 사물의 색상과 형태 정보를 파악하기 위해 필요하다.
자신의 위치를 파악하기 위한 위성항법장치(GPS)는 무인차에 기본으로 탑재돼 있다.
주변 인지 정보를 토대로 목표 지점까지 안전하고 빠르게 도달하기 위한 판단을 내리는 것은 소프트웨어(SW)의 몫이다.
인체공학적 설계(HMIㆍHuman Machine Interface), 사고기록장치(EDRㆍEvent Data Recorder), DCU(DomainControl Unit) 등이 이 역할을 맡는다. 목적지까지의 경로를 계획하고, 장애물이 발생할 경우 피해갈지 그냥 갈지를 결정하고, 차선을 변경할지 방향을 바꿀지, 추월할지, 정지할지 등 주행 상황별로 행동을 판단한다.
사람들은 운전을 하면서 수없이 많은 다양한 상황과 마주치게 된다. 초보와 베테랑 운전자의 차이는 얼마나 많은 경험을 통해 상황에 따라 적절하게 대응할 수 있는지다.
무인차 역시 이러한 경험이 필요하다. 구글이 수년째 무인차 시험운전을 하는 것은 경험을 통해 학습을 하기 위해서다. 일종의 '머신러닝(기계학습)'인 셈이다.
판단한 대로 신속하게 자동의 조향장치나 가속ㆍ감속 장치를 제어하는 기술이 필요한데 이 역활을 담당하는 것이 액츄에이터다. 과거 운전자가 조작하는 기계적인 힘으로 동작하던 스티어링 휠, 가속페달, 제동페달은 최근 차량 내부 통신 규격인 CAN을 통해 이루어지고 있다. 차량의 각 부품끼리 데이터를 주고 받고 서로의 움직임을 제어하는 이 통신 규격은 무인차가 실제로 움직일 수 있는 기반이 된다.
이밖에 무인차를 위해서는 차량과 외부 환경을 연결하는 V2X(Vehicle to Everything) 기술이 필요하다. V2X는 V2V(Vehicle to Vehicle), V2R(Vehicle to Road) 등이 있다. 이 기술은 센서로 감지할 수 없는 다른 차량의 진행 방향 정보, 전방 도로의 교통사고 정보 등을 제공한다.
또 차량에 장착된 센서로부터 받는 실시간 정보와 지도를 매칭할 수 있는 정밀지도 기술도 필요하다.
이와 함께 무인차의 사고지점 전후 일정 기간 자동차의 내외부 영상 및 음성정보, 센서 정보, V2X 통신 정보, IVN(In Vehicle Network)을 통한 차량 정보 등을 저장하고 필요한 경우 저장한 데이터를 확인할 수 있는 ADR(Autonomous-driving Data Recorder) 기술도 없어서는 안된다.
강희종 기자 mindle@asiae.co.kr
<ⓒ투자가를 위한 경제콘텐츠 플랫폼, 아시아경제(www.asiae.co.kr) 무단전재 배포금지>




![전문가 4인이 말하는 '의료 생태계의 대전환'[비대면진료의 미래⑥]](https://cwcontent.asiae.co.kr/asiaresize/319/2026013014211022823_1769750471.png)














{kind=link}
{kind=link}