감자 칩도 부스러지지 않게 집는 만능 집게, 근육의 부담을 줄여주는 착용형 팔꿈치 수트 등을 만들 수 있는 로봇 부품 기술이 개발됐다.
울산과학기술원(UNIST) 신소재공학과 김지윤 교수팀과 기계공학과 배준범 교수팀은 부드럽고 유연한 소프트 로봇의 장점을 극대화할 수 있는 부품인 ‘소프트 밸브’ 기술을 개발했다.
튜브 형태의 이 부품은 외부 자극을 감지해 전기 없이 구동부 움직임을 정밀하게 조종하는 이중 기능 부품이다.
전기 없이 움직일 수 있어 수중이나 스파크가 튀는 환경에서 안전하게 쓸 수 있으며 이중 기능 부품으로 로봇의 경량화가 가능하다. 가격도 부품 한 개에 800원 정도로 저렴하다.
김지윤 교수는 “부드럽고 유연한 소프트 로봇 본체와 달리 자극 감지 센서나 구동 제어 부품은 여전히 딱딱한 전자 부품인 경우가 많았는데 이번 연구에서 센서와 구동 제어 부품도 부드럽고 유연한 소재로 만들어 냈다”고 설명했다.
연구팀은 이 소프트 밸브를 활용해 다양한 물건을 손쉽게 집을 수 있는 만능 집게를 만들었다. 이 집게는 단단한 로봇 손으로는 쉽게 부스러지는 감자 칩부터 무겁고 부피가 큰 나무토막까지 잘 집어냈다. 스파크가 튀는 환경이나 물속에서도 잘 작동했다.
또 이 부품으로 착용형 팔꿈치 보조 로봇을 만들어 팔 근육 부담을 효과적으로 줄였다. 사람의 팔 굽힌 각도에 따라 자동으로 팔꿈치 보조력이 증가하는 형태다. 로봇을 착용했을 때 팔꿈치에 작용하는 힘이 평균 63% 감소하는 것으로 나타났다.
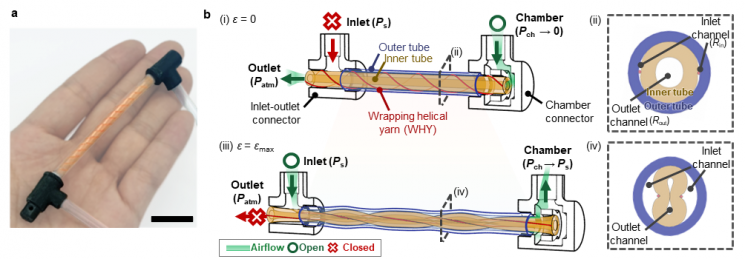
이 소프트 밸브는 튜브 속을 흐르는 공기로 구동부를 움직인다.
튜브 끝단을 당기면 튜브 속에 나선형으로 감겨있는 실이 튜브를 눌러 공기의 유입과 유출을 조절하는 원리다. 튜브 끝단을 잡아당기면 구동부가 마치 아코디언 바람통이 움직이는 모양처럼 늘어났다 줄었다 작동하게 된다.
또 연구팀은 튜브에 감겨있는 실의 구조나 개수를 정밀하게 프로그래밍해 공기의 유입과 유출을 다양하게 조절할 수 있음을 확인했다. 튜브 끝단에 동일한 힘을 가해도 실이 감긴 모양과 개수에 따라 구동부를 상황에 알맞게 조절할 수 있는 것이다.
배준범 기계공학과 교수는 “개발한 부품은 전자 소자 없이 소재 프로그래밍을 이용해 간단히 사용할 수 있어 다양한 웨어러블 시스템의 개발에도 크게 기여할 것”이라고 설명했다.
지금 뜨는 뉴스
이번 연구는 국제학술지인 네이처 커뮤니케이션(Nature Communications)에 2023년 7월 4일 자로 온라인 게재됐다. 연구 수행은 과학기술정보통신부 한국연구재단(NRF), 한국재료연구원(KIMS), 한국산업기술평가관리원(KEIT)의 지원을 받아서 이뤄졌다.
영남취재본부 황두열 기자 bsb03296@asiae.co.kr
<ⓒ투자가를 위한 경제콘텐츠 플랫폼, 아시아경제(www.asiae.co.kr) 무단전재 배포금지>




















{kind=link}