KAIST Professors Jeong Jae-woong and Kim Jeong's Joint Research Team
Develops 'Electromyography Sensor' Unaffected by Skin Condition
Expected to Facilitate Patient Rehabilitation Activities Using Robots
A new electromyography (EMG) sensor technology has been developed that can be stably controlled over a long period without being affected by the wearer’s sweat and dead skin cells.
KAIST announced on the 23rd that a joint research team including Professor Jae-woong Jeong from the Department of Electrical Engineering and Electronics and Professor Jung Kim from the Department of Mechanical Engineering developed a stretchable and adhesive microneedle sensor capable of measuring high-quality electrical physiological signals regardless of the wearer’s skin condition.
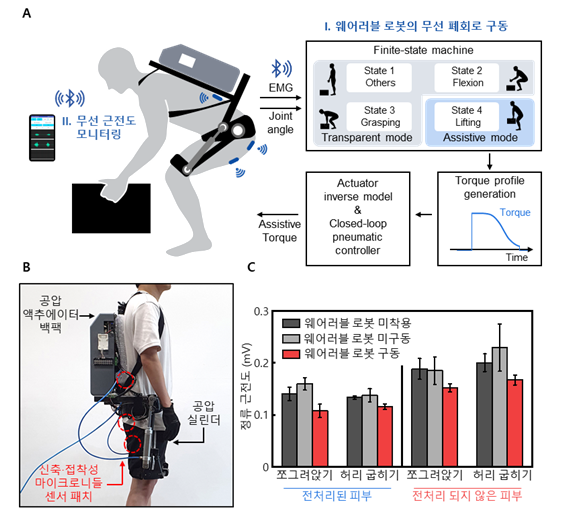 Conceptual diagram of the wearable robot system (A) and the wearable robot (B) wirelessly linked with a stretchable and adhesive microneedle sensor circuit patch developed by the KAIST joint research team, and comparison data of the assistive effects of the wearable robot depending on skin pretreatment (C). Provided by KAIST
Conceptual diagram of the wearable robot system (A) and the wearable robot (B) wirelessly linked with a stretchable and adhesive microneedle sensor circuit patch developed by the KAIST joint research team, and comparison data of the assistive effects of the wearable robot depending on skin pretreatment (C). Provided by KAIST
To recognize a person’s movement intention, wearable robots require electrical physiological sensors that can measure electromyography signals generated by the body more accurately.
However, existing sensors have limitations such as signal quality degradation over time and being affected by hair, dead skin cells, sweat, and other factors on the skin. Additionally, because they have a harder physical property than the skin, they cannot follow skin deformation when the wearer moves, causing noise (signal interference), which made it difficult to achieve reliable long-term control of wearable robots.
The technology developed by the joint research team is significant in that it overcomes these drawbacks and limitations. First, this technology integrates a microneedle array capable of penetrating the skin’s stratum corneum onto a stretchable and adhesive conductive substrate, enabling long-term comfortable wear and high-quality EMG measurement.
This performance is expected to allow stable control regardless of changes in the wearer’s skin condition without the need for skin preparation procedures such as removing sweat and dead skin cells before wearing the device on the body.
 (From left) Professor Jeong Jae-woong, Professor Kim Jeong, PhD candidate Kim Hee-soo, PhD candidate Lee Joo-hyun. Provided by KAIST
(From left) Professor Jeong Jae-woong, Professor Kim Jeong, PhD candidate Kim Hee-soo, PhD candidate Lee Joo-hyun. Provided by KAIST
The joint research team also fabricated a stretchable and adhesive microneedle sensor by utilizing a soft silicone polymer substrate to integrate the microneedles.
This sensor effectively lowers skin contact resistance by penetrating the stratum corneum, which has high resistance, with rigid microneedles, enabling high-quality electrical physiological signals even if the skin is contaminated by hair, dead skin cells, sweat, or foreign substances. At the same time, the soft conductive adhesive substrate conforms to skin stretching caused by human movement, providing comfortable wear and minimizing motion artifacts caused by movement.
To verify the effectiveness of the developed stretchable and adhesive microneedle sensor patch, the joint research team also conducted motion assistance experiments using wearable robots.
The results confirmed that the stretchable and adhesive microneedle sensor patch attached to the leg detected electrical signals generated by muscles and transmitted movement intentions to the wearable robot, helping the person easily lift heavy loads, demonstrating that the wearable robot can effectively assist the user’s movements.
Professor Jae-woong Jeong of KAIST said, “The biggest feature of the stretchable and adhesive microneedle sensor developed by the joint research team is that it is not affected by skin condition,” adding, “With stable EMG sensing enabling accurate and reliable wearable robot control, it is expected that rehabilitation activities for patients using robots will become easier in the future.”
© The Asia Business Daily(www.asiae.co.kr). All rights reserved.
![Clutching a Stolen Dior Bag, Saying "I Hate Being Poor but Real"... The Grotesque Con of a "Human Knockoff" [Slate]](https://cwcontent.asiae.co.kr/asiaresize/183/2026021902243444107_1771435474.jpg)











{kind=link}
{kind=link}