KAIST 정재웅 교수,김정 교수 공동 연구팀
피부 상태 영향 받지 않는 '근전도 센서' 개발
로봇 이용한 환자의 재활 활동 수월해질 전망
착용자의 땀과 각질 등에 영향을 받지 않고, 장기간 안정적으로 제어가 가능한 근전도 센서 기술이 개발됐다.
KAIST는 전기 및 전자공학부 정재웅 교수와 기계공학과 김정 교수가 참여한 공동 연구팀이 착용자의 피부 상태에 영향을 받지 않고, 고품질의 전기 생리 신호 측정이 가능한 신축·접착성 마이크로니들 센서를 개발했다고 23일 밝혔다.
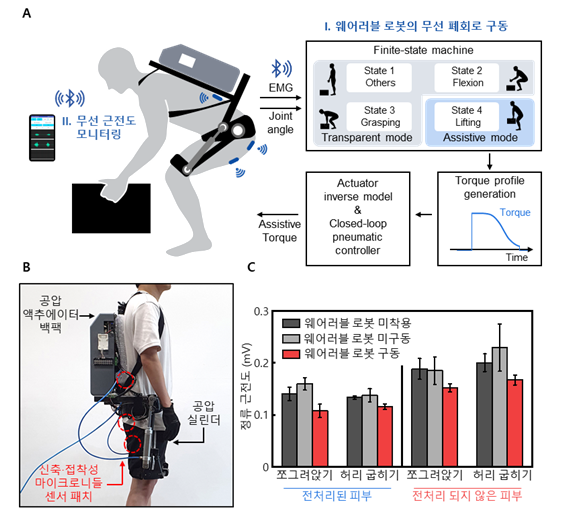 웨어러블 로봇 시스템 개념도(A)와 KAIST 공동연구팀이 개발한 신축·접착성 마이크로니들 센서 회로 패치를 무선으로 연동한 웨어러블 로봇(B), 피부 전처리 여부에 따른 웨어러블 로봇의 보조 효과 비교(C) 자료. KAIST 제공
웨어러블 로봇 시스템 개념도(A)와 KAIST 공동연구팀이 개발한 신축·접착성 마이크로니들 센서 회로 패치를 무선으로 연동한 웨어러블 로봇(B), 피부 전처리 여부에 따른 웨어러블 로봇의 보조 효과 비교(C) 자료. KAIST 제공
웨어러블 로봇이 사람의 움직임 의도를 인식하기 위해선 신체에서 발생하는 근전도를 보다 정확하게 측정할 수 있는 전기 생리 센서가 필요하다.
하지만 기존 센서는 시간에 따라 신호의 품질이 떨어지거나 피부의 털과 각질, 땀 등의 영향을 받는 제약이 따랐다. 또 피부보다 단단한 물성으로 착용자가 움직일 때 피부 변형을 따라갈 수 없어 노이즈(신호 잡음)를 발생시키는 단점으로 장시간 신뢰성 높은 웨어러블 로봇 제어가 어려웠다.
공동연구팀이 개발한 기술은 이러한 단점과 한계를 해소한다는 데 의미가 있다. 우선 이 기술은 신축성과 접착성이 있는 전도성 기판에 피부 각질층을 통과할 수 있는 마이크로니들 어레이를 집적해 장기간 불편함 없이 착용, 고품질의 근전도 측정을 가능케 한다.
이 같은 성능은 웨어러블을 인체에 착용하기 전 땀과 각질 등을 제거하는 피부 준비 작업을 거치지 않고, 착용자의 피부 상태 변화에 상관없이 안정적으로 제어할 수 있게 할 것으로 보인다.

공동연구팀은 부드러운 실리콘 중합체 기판을 활용해 마이크로니들을 집적한 신축·접착성 마이크로니들 센서도 제작했다.
이 센서는 단단한 마이크로니들이 높은 저항을 가진 피부의 각질층을 투과해 피부 접촉 저항을 효과적으로 낮춤으로써 털, 각질, 땀, 이물질로 피부가 오염되더라도 고품질의 전기 생리 신호를 얻을 수 있게 한다. 동시에 부드러운 전도성 접착 기판이 사람의 움직임으로 피부가 늘어나는 상황에 순응해 편안한 착용감을 제공하고, 움직임으로 인한 동작 잡음을 최소화하는 기능도 가졌다.
공동연구팀은 개발한 신축·접착성 마이크로니들 센서 패치의 효용성을 검증하기 위해 웨어러블 로봇을 이용한 동작 보조 실험도 진행했다.
이 결과 다리에 부착된 신축·접착성 마이크로니들 센서 패치가 근육에서 발생하는 전기신호를 감지하고 동작 의도를 웨어러블 로봇에 전송해 사람이 무거운 짐을 손쉽게 들어 올릴 수 있도록 도와주는 등 웨어러블 로봇이 사용자의 동작을 효과적으로 보조할 수 있다는 점을 확인했다.
지금 뜨는 뉴스
정재웅 KAIST 교수는 “공동연구팀이 개발한 신축·접착성 마이크로니들 센서는 피부 상태에 영향받지 않는 점이 가장 큰 특징”이라며 “안정적인 근전도 센싱으로 정확하고 안정적인 웨어러블 로봇 제어가 가능해져 앞으로는 로봇을 이용한 환자의 재활 활동이 좀 더 용이해질 수 있을 것으로 기대한다”고 말했다.
대전=정일웅 기자 jiw3061@asiae.co.kr
<ⓒ투자가를 위한 경제콘텐츠 플랫폼, 아시아경제(www.asiae.co.kr) 무단전재 배포금지>





![전문가 4인이 말하는 '의료 생태계의 대전환'[비대면진료의 미래⑥]](https://cwcontent.asiae.co.kr/asiaresize/319/2026013014211022823_1769750471.png)














{kind=link}
{kind=link}