 Joint research team of Professor Kang Jiyeon of the Department of AI Convergence at the Gwangju Institute of Science and Technology.
Joint research team of Professor Kang Jiyeon of the Department of AI Convergence at the Gwangju Institute of Science and Technology.
For people who have lost an arm due to an accident or illness and need a prosthetic arm, an international joint research team led by a Korean researcher has developed a technology that allows them to virtually experience and select a customized prosthetic arm using a robot in advance. This technology is expected to enable the design of lighter and more efficient customized prosthetic arms for users.
On February 24, the Gwangju Institute of Science and Technology (GIST) announced that a Korea-U.S. joint research team led by Professor Kang Jiyeon of the Department of AI Convergence has developed a robot-based prosthetic arm experience system called "I-PEDLE (Intelligent Prosthesis Emulator for Daily Living Enhancement)," which supports the design of upper-limb prosthetic arms (the entire arm from shoulder to hand) tailored to individuals by taking into account movements from the shoulder to the hand. A key feature of this system is its structure, which allows free movement in multiple directions.
This technology reproduces the movements of various prosthetic arms using a robot so that users can experience them directly, and then proposes a customized prosthetic arm configuration suitable for each individual based on the resulting data.
Although high-performance prosthetic arm technologies for patients with upper-limb amputation have continued to advance, actual user satisfaction remains low due to limitations such as weight burden, complex control methods, and high cost. In particular, many commercial prosthetic arms lack active wrist functions, and to compensate for this, users may exhibit movements that excessively rely on the shoulder or elbow. Experts have pointed out that if such movements are repeated, they may lead to musculoskeletal pain in the long term.
To address these issues, multi-directional robotic prosthetic arms that precisely realize wrist movements are being developed. However, despite their high price, clear criteria and objective evaluation systems for user-specific customized design have not yet been established.
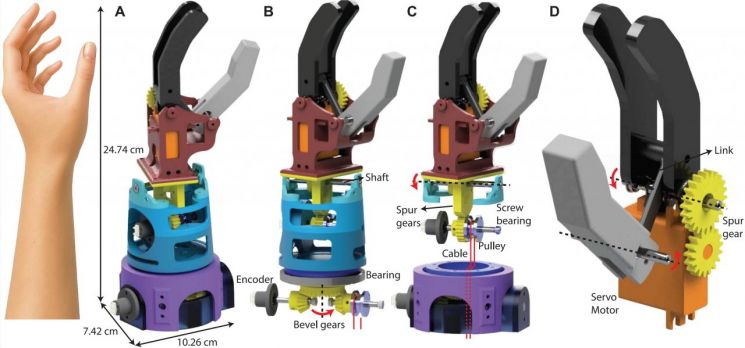 Mechanical design and operating mechanism of a cable-driven I-PEDLE multi-degree-of-freedom prosthetic hand.
Mechanical design and operating mechanism of a cable-driven I-PEDLE multi-degree-of-freedom prosthetic hand.
The research team developed the I-PEDLE, a robot-based prosthetic arm experience system that implements a lightweight, three-degree-of-freedom wrist function using a cable-driven mechanism. By placing the cable motors outside the prosthetic arm, they minimized its weight, while realizing precise wrist movements required for daily use, including: rotating the wrist inward and outward, moving the wrist at natural angles, and grasping and holding objects.
When healthy participants were asked to perform daily activities using the system, the researchers confirmed that certain combinations of wrist movements reduced unnecessary overuse of other joints, such as excessively rotating or lifting the shoulder to operate the prosthetic arm.
In addition, the research team implemented various wrist-function conditions in the same environment and verified performance by collecting and analyzing sensor data on joint movements during task execution, as well as on compensatory movements in which other joints are used more to make up for missing functions.
This makes it possible to quantitatively evaluate changes in shoulder and elbow movements according to variations in motion, and is expected to shift the prosthesis selection process from one that relies on user experience to a data-driven, rational decision-making approach.
Furthermore, because different wrist configuration conditions can be compared on a single platform, the system is expected to be used in the future as an evaluation and verification platform for user-customized prosthetic arm design.
Professor Kang Jiyeon said, "This study is meaningful in that it presents a robot-based platform that can quantitatively evaluate prosthetic wrist designs using user-centered metrics," adding, "It will serve as an important foundation for the development of personalized prosthetic arm design and human-robot interaction-based rehabilitation technologies in the future."
Going forward, the team plans to expand the research by validating the system with actual upper-limb amputees and developing customized prosthetic design algorithms based on a human-in-the-loop approach, which finds the optimal design by reflecting user responses in real time.
This study was led by Professor Kang Jiyeon of the GIST Department of AI Convergence and jointly conducted with researchers from the University of Michigan and the State University of New York at Buffalo. It was supported by the Disability and Rehabilitation Engineering program of the U.S. National Science Foundation (NSF), as well as the Biomedical Technology Development Program and the Basic Research Program for Individual Researchers funded by the Ministry of Science and ICT and the National Research Foundation of Korea. The research results were published online on February 13 in IEEE Robotics and Automation Letters, an international journal in the field of robotics.
© The Asia Business Daily(www.asiae.co.kr). All rights reserved.
![Clutching a Stolen Dior Bag, Saying "I Hate Being Poor but Real"... The Grotesque Con of a "Human Knockoff" [Slate]](https://cwcontent.asiae.co.kr/asiaresize/183/2026021902243444107_1771435474.jpg)












{kind=link}
{kind=link}