Development of Ultra-Small Robot Mimicking Water Strider Movement
First to Successfully Reproduce Lagobelia's Ultrafast Fan-Leg Mechanism
A domestic research team has succeeded in developing the world's first ultra-small robot that mimics the water strider and can move freely on the surface of water.
The Ministry of Science and ICT announced that the research team led by Professor Ko Jesung at Ajou University (with Dr. Kim Dongjin as the first author) has successfully developed the world's first ultra-small robot that mimics Lagobelia (fan-legged water strider), an insect capable of agile movement on the water surface.
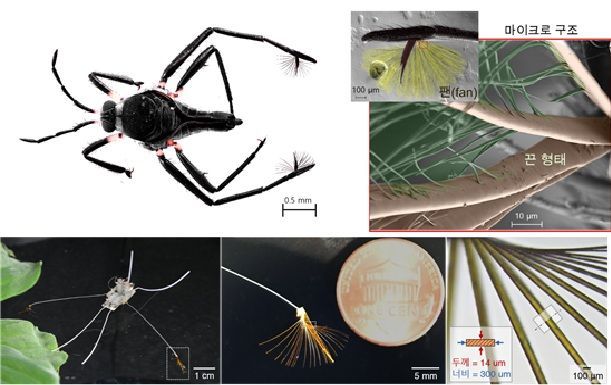 Biological/Artificial Fan Structures of Lagobelia and Biomimetic Robots. Biological photo of Lagobelia and electron microscope images of the fan’s microstructure. The flat ribbon-shaped microstructure provides essential functions for the organism’s behavior (top image). Photo of an artificial fan with a similar flat ribbon shape mimicking Lagobelia. This robot can realize agile biological movements (bottom image). Illustration description and image courtesy of Professor Je-Sung Ko, Ajou University.
Biological/Artificial Fan Structures of Lagobelia and Biomimetic Robots. Biological photo of Lagobelia and electron microscope images of the fan’s microstructure. The flat ribbon-shaped microstructure provides essential functions for the organism’s behavior (top image). Photo of an artificial fan with a similar flat ribbon shape mimicking Lagobelia. This robot can realize agile biological movements (bottom image). Illustration description and image courtesy of Professor Je-Sung Ko, Ajou University.
Lagobelia, a member of the water strider family, generates propulsion by instantly spreading the fan-shaped structures at the ends of its legs, allowing it to maneuver swiftly even in fast-moving water. However, until now, the mechanism by which this structure operates in such a short time had not been revealed.
To clarify this natural phenomenon, it was necessary to actually create a robot with the same structure and prove whether it operates in the same way. However, previous studies had limitations, as they relied only on simple leg structures or muscle-based mechanisms, making it difficult to replicate complex maneuvers such as speed control, rotation, and braking, as seen in insects.
Professor Ko Jesung's research team, in collaboration with research groups at UC Berkeley and Georgia Tech in the United States, succeeded in developing an ultra-small robot that operates on the water surface in the same manner as Lagobelia.
The research team created a fan-shaped structure using 21 artificial hair-like ribbons and applied it to an insect-sized robot. They confirmed that this structure enables strong propulsion and agile directional changes in water.
Through this, the team discovered that the fan-shaped structure at the end of Lagobelia's legs is not spread by muscle force but rather by interaction with the aquatic environment (elastocapillary phenomenon). When the leg enters the water, it unfolds by itself within 0.01 seconds, and outside the water, it instantly folds back, exhibiting an ultra-fast self-morphing structure.
 The research achievements of Professor Ko Jesung's team at Ajou University were published as a cover paper in the journal Science on the 21st (local time).
The research achievements of Professor Ko Jesung's team at Ajou University were published as a cover paper in the journal Science on the 21st (local time).
This research achievement is even more meaningful as it is the result of 15 years of accumulated expertise in the study of water strider behavior on water surfaces by Professor Ko Jesung, dating back to his doctoral studies.
Professor Ko stated, "By elucidating the structural intelligence found in natural insects, this research will be utilized in various fields such as environmental monitoring, rescue operations, and biomimetic robotics."
This research was supported by the Basic Research Program of the Ministry of Science and ICT and was published as a cover paper in the world-renowned journal Science on August 22, 2025 (2:00 p.m. EDT, August 21, local time). (Title: Ultrafast elastocapillary fans control agile maneuvering in ripple bugs and robots)
© The Asia Business Daily(www.asiae.co.kr). All rights reserved.












{kind=link}
{kind=link}