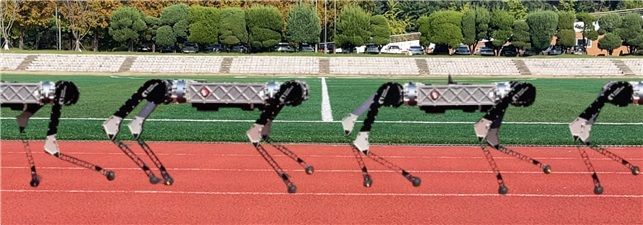
The quadruped robot ‘Laibo,’ which used to run freely on beach sand, is now challenging itself to complete a full marathon course.
KAIST announced on the 15th that the quadruped robot 'Laibo 2,' newly developed by Professor Jemin Hwangbo's research team in the Department of Mechanical Engineering, will attempt to complete the full 42.195 km course at the ‘2024 Sangju Gotgam Marathon’ held at Sangju Citizen Stadium on the 17th.

The full course that Laibo 2 will challenge is about twice the longest running distance (20 km) of existing quadruped robots. Previously, the research team developed Laibo 2 to walk continuously for 43 km on a single charge. Additionally, it succeeded in walking continuously for 4 hours and 40 minutes by following a GPS route stored at the KAIST main stadium.
The full marathon completion is attempted to demonstrate Laibo 2’s walking performance in urban environments. Until now, the running distances of walking robots were mostly measured in controlled laboratory environments or remained theoretical figures.
The research team plans for Laibo 2 to run alongside the general public and have its record measured during this challenge. The team emphasized that this is the first attempt to verify the practical applicability of quadruped robots in real-world environments.
Quadruped robots have the advantage of stable walking on rough terrains such as ice, sand, and mountainous areas, but short running distances and operating times have been pointed out as limitations.
In fact, Laibo 2 made its first attempt at the ‘Geumsan Ginseng Festival Marathon’ last September but failed to complete the marathon as its battery ran out at the 37 km mark, 10 km shorter than predicted in the laboratory. The research team cited the reason for failure as Laibo 2’s frequent acceleration and deceleration caused by not maintaining a constant speed while running alongside other runners on the actual marathon course.
To overcome this, the team implemented joint stiffness control, previously performed on a PC, directly into the motor driver to improve control efficiency, improved the internal structure to increase battery capacity by 33%, and addressed technical issues. The team explained that Laibo 2 can now run up to 67 km on straight sections.
PhD candidate Chungin Lee (co-first author) said, “Being able to comprehensively analyze walking losses from the perspectives of mechanism, electronics, and walking methods was crucial in improving Laibo 2’s walking efficiency,” adding, “This research achievement will be an important milestone in expanding the operational range of quadruped robots to urban environments.”
Meanwhile, this research was conducted with support from Samsung Electronics Future Technology Development Center and Lion Robotics Co., Ltd.
© The Asia Business Daily(www.asiae.co.kr). All rights reserved.
![Clutching a Stolen Dior Bag, Saying "I Hate Being Poor but Real"... The Grotesque Con of a "Human Knockoff" [Slate]](https://cwcontent.asiae.co.kr/asiaresize/183/2026021902243444107_1771435474.jpg)














{kind=link}
{kind=link}