DGIST Professor Dongwon Yoon's Team: "Easy to Manufacture, Stable Even Under External Impact"
[Asia Economy Reporter Kim Bong-su] A domestic research team has developed core technology for robotic hands that operate as flexibly and precisely as human hands.
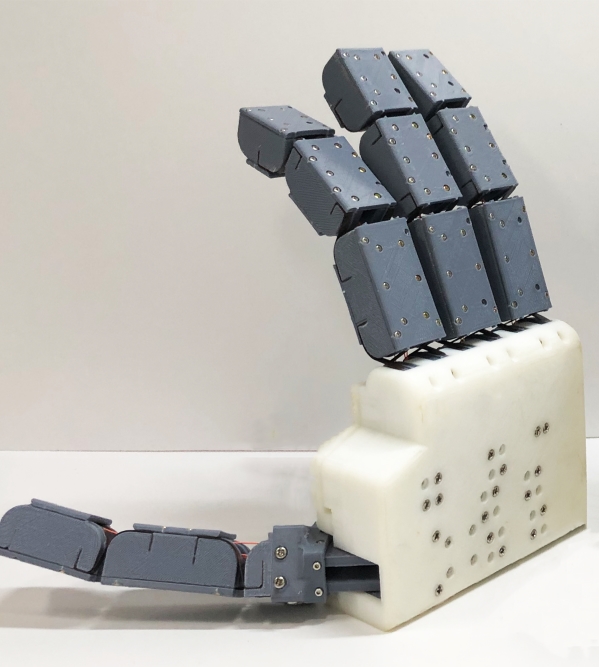
Daegu Gyeongbuk Institute of Science and Technology (DGIST) announced on the 27th that Professor Dongwon Yoon's research team in the Department of Robotics Engineering developed core technology for a humanoid robot hand that is as precise and flexible as a human hand. The research team explained that it is easy to manufacture and can operate stably even under external impact.
In recent industrial sites, the use of robots is increasing to improve work efficiency through automation systems. Robot hands are mainly used for advanced tasks such as gripping or assembling objects with various stiffness. Rolling bearing-based ball bearing rotary joints are mainly used for precise robot hand control. However, they are expensive, difficult to assemble, and prone to failure from external shocks, leading to the development of various flexible joints as alternatives.
The research team devised a new structure for the robot hand to reinforce the weak stiffness of existing flexible structure robot hands. They applied four flexible hinges, shaped to fit the finger joints, per joint, arranged in two pairs crossing in an X shape. Experiments demonstrated that this design absorbs 46.7% more impact in three-axis directions compared to conventional bearing-based robot hands. Notably, using a non-motor-driven underactuated wire mechanism, it was confirmed that the hand can grasp objects of various shapes and support weights up to 4 kg.
The technology features enhanced stiffness in necessary directions using flexible materials and a unique structure to achieve excellent gripping ability, while simultaneously realizing high impact absorption through the flexible structure. Unlike conventional bearing-based robot hands, it does not require expensive materials or complex processes, which is expected to significantly reduce manufacturing costs.
Professor Dongwon Yoon of DGIST's Department of Robotics Engineering said, “This achievement offers easier manufacturing and price competitiveness compared to existing robot hands, increases payload capacity while retaining the advantages of flexible hinges, making it suitable for practical industrial applications.” He added, “We will continue follow-up research to commercialize this technology in various industrial manufacturing sites and service robots.”
The research results were published online on March 5 in the international journal Soft Robotics.
© The Asia Business Daily(www.asiae.co.kr). All rights reserved.
![Clutching a Stolen Dior Bag, Saying "I Hate Being Poor but Real"... The Grotesque Con of a "Human Knockoff" [Slate]](https://cwcontent.asiae.co.kr/asiaresize/183/2026021902243444107_1771435474.jpg)











{kind=link}