Director Park Hyunjun of Robeuroseu Wins Best Paper Award at the Korea Robotics General Academic Conference
Can robots that dance and run like humans evolve into robots that surpass humans? A paper that offers a directional answer to this question has emerged in Korea.
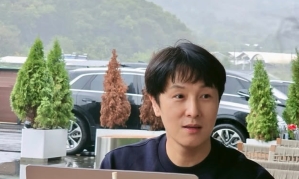
![[No Filter Robot]Will Imitation Learning Break Robots' Speed Limits?](https://cphoto.asiae.co.kr/listimglink/1/2026022510571651897_1771984637.jpg) Park Hyunjun, director at Robeuroseu, is holding up the certificate after winning the Best Paper Award at the 2026 Korea Robotics Comprehensive Academic Conference on February 6. Photo by Paek Jongmin
Park Hyunjun, director at Robeuroseu, is holding up the certificate after winning the Best Paper Award at the 2026 Korea Robotics Comprehensive Academic Conference on February 6. Photo by Paek Jongmin
On February 6, in Pyeongchang, Gangwon Province, Park Hyunjun, director at Robeuroseu, received the Best Paper Award at the 2026 Korea Robotics General Academic Conference for his work titled "Proleptic Temporal Ensemble for Improving the Speed of Robot Tasks Generated by Imitation Learning." Robeuroseu is a Korean robotics startup that develops humanoids, robot hands, and imitation-learning-based object manipulation technologies.
Park explained that the starting point of this research was the "limit of speed." He said, "Imitation learning trains directly on data demonstrated by humans. The problem is that the speed of a robot's work ultimately becomes constrained by the speed of the demonstrator."
Imitation learning, in which robots learn behaviors through human demonstrations, is drawing attention as a core technology for generating robot motions in unstructured environments. However, conventional approaches are structurally dependent on the speed at which humans perform tasks. According to Park, up to now there has been no clear alternative to increase a robot's speed other than having the demonstrator move faster during the data collection stage.
To overcome this limitation, he proposed the Proleptic Temporal Ensemble (PTE) method. Regarding this technique, he said, "The key is to predict future actions and pull those goals forward into the present for execution. The structure makes the robot move toward a goal that is one step ahead, rather than simply following the human as-is."
PTE can be applied on top of the existing transformer-based Action Chunking with Transformers (ACT) algorithm, and it directly utilizes already collected demonstration data and pre-trained policies. It does not require additional training or extra computational cost, and its implementation is relatively simple.
The performance was verified through real-world experiments on color classification of blocks by a robot. Compared with the ACT method, it improved task execution speed by up to three times while maintaining a high success rate.
Park added that this research can have the following effects: First, it can boost the productivity of existing policies without additional data collection, thereby lowering the cost of applying them in industrial settings. Second, by technically extending the performance ceiling of imitation-learning-based robots, which had been capped at human levels, it can broaden the scope of task automation in logistics, manufacturing, and service sectors. Third, by presenting a design framework for balancing speed and stability, it lays the groundwork for future research on high-speed, high-precision autonomous object manipulation technologies.
He concluded his acceptance remarks by saying, "The goal was to break the assumption that imitation-learning-based policies are bound to the demonstrator's speed."
© The Asia Business Daily(www.asiae.co.kr). All rights reserved.








{kind=link}