Professor Yongrok Jung from the School of Mechanical Engineering at Kyungpook National University, in collaboration with Professors Jung Kim and Inkyu Park from KAIST, has developed a "field-programmable robotic folding sheet" that allows users to freely adjust the folding location, direction, and magnitude in real time according to their commands.
Folding structures are utilized as intuitive and efficient shape-changing mechanisms in robot design, and various applications have been explored, including space and aerospace robots, soft robots, and foldable grippers (robotic hands).
 (From left) Professor Inkyu Park, Department of Mechanical Engineering, KAIST; Professor Yongrok Jung, School of Mechanical Engineering, Kyungpook National University; Dr. Hyungyu Park, Samsung Electronics; Professor Jung Kim, Department of Mechanical Engineering, KAIST
(From left) Professor Inkyu Park, Department of Mechanical Engineering, KAIST; Professor Yongrok Jung, School of Mechanical Engineering, Kyungpook National University; Dr. Hyungyu Park, Samsung Electronics; Professor Jung Kim, Department of Mechanical Engineering, KAIST
However, existing folding mechanisms have limitations because the folding location and direction are fixed, requiring a new design and fabrication of the structure whenever the environment or task changes.
According to Kyungpook National University on August 6, the research team successfully introduced the concept of "field-programmability" to folding structures in order to address these issues.
The team proposed an integrated material technology and programming methodology that enables real-time reflection of user commands?specifying where, in which direction, and how much to fold?onto the material’s shape.
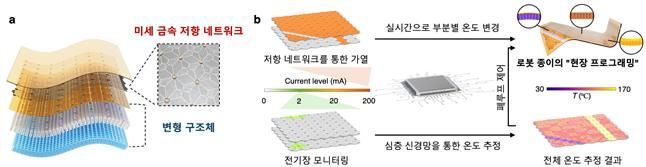
The newly developed robotic sheet features a structure in which a fine metallic resistor network is embedded within a thin and flexible polymer substrate. Each metallic resistor simultaneously functions as both a heater and a temperature sensor, enabling the detection and control of the folding state without the need for any external devices.
Additionally, by combining a genetic algorithm and a deep neural network in the software, the system allows users to input their desired folding position, direction, and intensity. The sheet then autonomously repeats heating and cooling cycles to achieve the precise target shape.
Furthermore, closed-loop control of the temperature distribution was implemented to enhance real-time folding accuracy, compensate for environmental variations, and address the slow response speed?a drawback of conventional heat-based folding technologies.
This enables the real-time implementation of various robotic functions without the need for complex hardware redesign.
Based on this technology, the research team realized an adaptive robotic hand (gripper) capable of applying different grasping strategies to suit various object shapes using a single material.
They also demonstrated biomimetic locomotion strategies, such as walking and crawling, using the developed "robotic sheet" (a thin and flexible type of robot).
Professor Yongrok Jung explained, "Conventional soft robot technologies typically allow a single robot to perform a single function. However, this research shows that a single robot can perform multiple functions and can even be programmed to add new functions."
He added, "I believe soft robots can be extremely useful in a variety of environments, especially in space exploration where payload constraints are severe."
This research was supported by the National Research Foundation of Korea (Ministry of Science and ICT). The co-first authors are Professor Yongrok Jung and Dr. Hyungyu Park (currently at Samsung Advanced Institute of Technology, Samsung Electronics), and the corresponding authors are Professor Jung Kim and Professor Inkyu Park from KAIST. The results were published in the August online edition of the international journal Nature Communications.
© The Asia Business Daily(www.asiae.co.kr). All rights reserved.








{kind=link}
{kind=link}