카이스트 연구팀 내놓아
[아시아경제 정종오 기자] 로봇의 피부 역할을 하는 촉각 센서가 개발됐다.
카이스트(KAIST, 총장 강성모) 기계공학과 김정, 박인규 교수 공동 연구팀이 실리콘과 탄소 소재를 활용한 로봇의 피부 역할을 할 수 있는 촉각 센서를 내놓았다. 충격 흡수가 가능하면서 다양한 형태의 촉감을 구분할 수 있어 앞으로 로봇의 외피로 이용 가능할 것으로 기대된다.
피부는 인체에서 가장 많은 부분을 차지하는 기관이다. 주요 장기를 외부 충격으로부터 보호하는 동시에 섬세한 촉각 정보를 측정 및 구분해 신경계에 전달하는 역할을 한다. 현재 로봇 감각 기술은 시각, 청각 부분에서는 인간의 능력에 근접하고 있는데 촉각의 경우는 환경의 변화를 온몸으로 감지하는 피부 능력에 비해 많이 부족하다.
인간과 비슷한 기능의 피부를 로봇에게 적용시키기 위해선 높은 신축성을 갖고 충격을 잘 흡수하는 피부 센서 기술의 개발이 필수적이다. 전기 배선을 통해 몸 전체에 분포된 많은 센서를 연결하는 기술 또한 해결해야 할 문제이다.
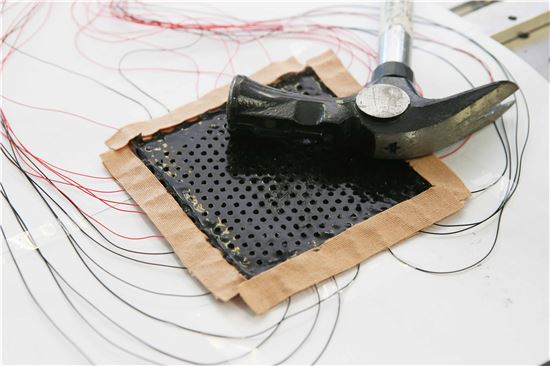
연구팀은 문제 해결을 위해 실리콘과 탄소나노튜브(CNT)를 혼합해 복합재를 만들었다. 이를 전기임피던스영상법(EIT)라는 의료 영상 기법과 결합했다. 넓은 영역에 가해지는 다양한 형태의 힘을 전기 배선 없이도 구분할 수 있는 기술을 개발했다. 개발된 로봇 피부는 망치로 내려치는 수준의 강한 충격도 견딜 수 있다. 센서의 일부가 파손돼도 파손 부위에 복합재를 채운 뒤 경화시키면 재사용이 가능하다.
3D 프린터 등으로 만들어진 3차원 형상 틀에 실리콘-나노튜브 복합재를 채워 넣는 방식으로 제작할 수 있다. 기존 2차원 평판뿐 아니라 다양한 3차원 곡면으로 제작이 가능해 새로운 형태의 컴퓨터 인터페이스도 개발할 수 있다. 이 기술은 다른 형태의 위치나 크기 등을 촉각적으로 구분할 수 있고 충격 흡수가 가능한 로봇의 피부, 3차원 컴퓨터 인터페이스, 촉각 센서 등에 적용 가능할 것으로 예상된다.
이번 연구는 나노 구조체와 센서 분야의 전문가인 박인규 교수와 바이오 로봇 분야 전문가인 김정 교수가 공동으로 진행했다. 김정 교수는 "신축성 촉각 센서는 인체에 바로 부착 가능할 뿐 아니라 다차원 변형상태에 대한 정보를 제공할 수 있다"며 "로봇 피부를 포함한 소프트 로봇 산업과 착용형 의료기기 분야에 기여할 것"이라고 내다봤다.
박인규 교수는 "기능성 나노 복합소재와 컴퓨터단층법의 융합을 이용해 차세대 유저인터페이스를 구현한 것"이라고 평가했다. 이번 연구는 1저자 이효상 박사과정 외 권동욱, 조지승 연구원 등이 함께 했다.
정종오 기자 ikokid@asiae.co.kr
<ⓒ투자가를 위한 경제콘텐츠 플랫폼, 아시아경제(www.asiae.co.kr) 무단전재 배포금지>




![[포토]BTS 데뷔 10주년 맞아 하이브 앞 찾은 외국인관광객들](https://cwcontent.asiae.co.kr/asiaresize/276/2023061308571161328_1686614230.jpg)

![[포토] '발리댁' 가희, 탄탄한 복근](https://cwcontent.asiae.co.kr/asiaresize/276/2022101417545469305_1665737695.jpg)
{kind=link}